

About Spindle System Design and Failure Points
Published by NXGEN CNC on Jan 1st 2020
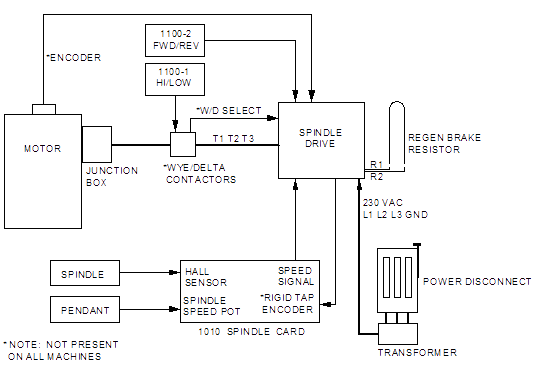
An overview of the Fadal Spindle Drive system and checks to perform upon failure.
Always check the basics before replacing parts...
Common Failure Points Recommended To Check
1) Parameter Settings - The HIGH TORQUE/RIGID TAP parameter:
For machines with Wye/Delta wiring, verify the parameter is set to HIGH TORQUE/RIGID TAP. This allows an approximate 1 second dwell for the Wye/Delta Contactors to switch and settle before a spindle ON is commanded to the Spindle Drive. This delay helps to avoid contactor arcing.
This parameter was also added to allow a dwell after shifting ranges and before commanding a spindle on command. This allows time for the slower hydraulic idlers to fully engage. An incorrect settinhg can cause the belts to "chirp" at spindle on.
2) Main Power Disconnect
a) Check Fuses or just replace if old, while they may carry voltage and look good with a volt meter, they might not supply the needed current.
b) Blade Engagement Contacts – clean; remove corrosion or pitting. A bad connection can cause an intermittent Phase Loss error or possibly DC low error message/condition (motor won’t get to full RPM) – DC low condition.
3) Transformer
The target input voltage to the spindle drive is 230 VAC. An input voltage too high can cause the drive (inverter) to fault out as DC High error or possibly burn out the braking regeneration resistor. To low of voltage causes DC low faults.
4) Drive Input Power Connections
At the L1 L2 L3 GND connections, a loose or bad connection can cause a Phase Loss error or possibly DC low error message/condition (motor won’t get to full RPM).
5) Breaking Resistor
A burnt out (open connection) or Wrong/Loose Connection can cause DC High error at Spindle Off or during deceleration. Disconnect REGEN wires and check the OHM value of resistor. Value must not be zero (open).
6) Spindle Encoder
The encoder directly affects the current output of a Vector Drive (Close Loop Vector).
The encoder is connected to a 1/4 pin that comes out of the top of the spindle motor. It is critical that the run out of the pin is within .001" TIR or less. Any pin wobble causes the motor to rotate erratically, shaking proportionally to the run out. Removing the encoder and indicate the run out. The pin is made of soft steel so you can "tap" it until the run out is with in tolerance.
Symptoms of a bad encode includes the following:
a) High current reading on the load meter while the spindle turns slowly.
b) Motor RPM pulsing with load meter showing instability.
Check the molex encoder connections at the encoder and the moldex at the spindle drive.
Click Here for the encoder test page.
7) Motor Connections
Check connections on both ends; at the drive's T1 T2 T3 GND and the Wye/Delta Contactors, if present. Loose or shorting connections will cause intermittent Over Current and other faults. Impedance (the opposition to the flow of an electric current through a conductor) is one of the common causes for misdiagnosis. The motor looses torque by not being able to receive the needed current. With a Vector drive, the current component is very critical to stable motor control.
While a simple ohms or a mega ohm test might pass, the complete circuit (wiring) from the drive to the motor must be able to supply the proper voltage and current (amperage)
8) Junction Box
Inspect the 12 motor lead connections, a loose connection will cause intermittent Over Current faults. The motor “bolt-clamp” connector insulation has been known to wear and cause intermittent shorts to GND. Inspect wires for any possible insulation breakdown by friction rubbing. Some drive systems use a terminal block inside the junction box for motor connections. These have been know to cause high impedance connections (see #7 above).
9) Wye/Delta Contactors
For machines with Wye/Delta High/Low contactors; all 7500 rpm machines and some custom machines. If old or pitted, consider replacing the contactors. Do not use sand paper to try and clean. The contacts are silver plated (lightly) and sanding typically adds to additional failure. As machines get older, these should be automatically replaced at any sign of Spindle Faults. Besides the contacts arcing/pitting, the electro magnet system can fail after time; any slight “buss”, audible or not, will fault the drive.
Also the micro-switch on the contactors can randomly switch the Drive table parameters while contactors do not switch; causing the spindle drive to use the wrong motor parameters.
10) 1100-1 CNC Board (Wye/Delta only)
The Wye/Delta contactor are directly controlled by the Solid State Relays on the board. Relay K27 – F30 (VMC 15) is the High Range solid state relay (SSR). It switches the Wye/Delta contactors and holds them in position by energizing the coils inside the Wye/Delta specific contactor. Besides possible internal SSR intermittent 120 vac failure, the 5vdc logic power on the 1100-1 board to the SSR is subject to corrosion; it’s not gold plated. Remove and reseat or replace with a new SSR or switch with K22 (spare Coolant 2).
11) Drive Troubleshooting
Call us for drive specific help.
12) Speed Signal
The spindle speed comes directly from the 1010 spindle controller card. Spindle speed variations from the signal input can be tested by using the M49 code to disable the Spindle Override Potentiometer. The speed command signal is a 10 volt DC signal with ±10 VDC for rigid tap and 0-10 VDC for non-RT machines. The voltage is proportionate to the commanded RPM and should be very stable. See also Encoder.
13) Drive Enable
The machine uses two FWD and REV relays to enable the drive and control the direction on the 1100-2 board. With Rigid Tap both relays are closed to enable the drive, the ±10 VDC signal controls rotation direction. With Non Rigid tap; one is closed for Forward and the other is closed for Reverse rotation, the 0-10 VDC signal controls rotation speed. Replace the relays or swap with known working relays.
14) Motor Rewinds
For Closed Loop Vector drives, after a spindle motor replacement (with a rewound motor) if the motor just rotates back and forth - switch the motor T1 and T2 (at the drive) to re-sink the encode/motor rotation logic. For Inverter drives (no encoder), switch the T1 and T2 when the motor is rotating the wrong direction.
15) 1010 Spindle Controller
The spindle controller card in slot #14 of the 1060 motherboard and controls specific spindle functions:
Speed Command - The speed command signal is a 10 volt DC signal with ±10 VDC for rigid tap and 0-10 VDC for non-RT machines. The voltage is propionate to the commanded RPM and should be very stable.
Orientation Magnet – Shares the input signal with the main cpu (1400 card) and is not read with DI, DS command. It is used for orientation (M6 and M19) and rigid tap calibration (G84.1 and G84.2). Also used for Motor Overload error detection.
Spindle Fault – Monitors the spindle drive fault line and declares ES condition to main CPU.
16) Motor Test
NOTE: FIRST DISCONNECT MOTOR WIRES T1, T2, T3 FROM THE DRIVE
Use a Mega Ohm Meter (1000 VDC or higher) to test the motor/wire insulation for shorts. You’re looking for consistency for all 3 legs. Replace the motor with a reading of 500 meg or lower.
Test at two points:
a) Individually test each T1, T2 and T3 motor leads to GRD – This tests the complete path starting from the drive output wires (T1,T2,T3) through contactors if present (Wye/Delta), through junction box connectors and motor windings. Repeat with T2 and T3. Test in both Hi/Low ranges if W/D configuration.
b) Motor Windings Coil to Coil short– There are six coils inside the motor (two wire pair per coil) that can be individually tested for a short. Contact us for further instructions about testing motor coil to coil shorts.
17) Wiring
The standard procedure was to bypass the machines internal motor wiring, and verify that the wiring and connectors (impedance) can carry the required motor current.
An Ohm or Mega Ohm test alone won’t always find a wiring problem. A bypass test requires running an external motor wire from the drive motor output (T1,T2 and T3) directly to the motor leads in the Junction Box, thus bypassing the all internal wiring. You must use the same gauge wiring that the machine is using for the test.
With the motor running, measure the motor current using an AC amp probe to determine that each leg of the motor has the same (balanced) current; each leg should be equal, within two amps. With the internal wiring bypassed, an imbalanced of current usually indicates a faulty motor.
Restore the internal wiring and start checking all wires and connections between the Drive and the spindle motor if the machine runs fine with the external wiring. The 7500 Wye/Delta machine has the Hi/Low contactors that need to be considered. Check the amperage at the beginning (Drive) and following the wiring to the motor wire connections.
18) Drive Bypass
You can bypass the drive and run the motor directly from a 230 VAC 3 phase supply. In bypassing the drive, this will help determine if the wiring and/or the motor are fine. Remove the spindle belt or disconnect the air supply and retract both idlers. Disconnect the motor wires (T1, T2 and T3) and the power input (L1, L2 and L3) wires from the spindle drive. Then connect the motor wires directly to the drives input 230 VAC 3 phase power wires.
At power on, the motor will instantly start-up and run at 1760 rpm; you do not need to start the CNC by pushing the Green Button for the CNC start-up.
Measure the motor current using an AC amp probe to determine if each leg of the motor has the same (balanced) current, each leg should be equal, within two amps. An imbalanced could indicate a faulty motor or wiring/connections. The 7500 rpm uses contactors that are switched for High/Low range and should be replaced when needed. Check the amperage at the beginning of the circuit (Drive), to the end (motor) of the wiring.